Библиотека normaliz.dll является частью операционной системы Windows различных версий. Ошибка, связанная с этим файлом, обычно проявляется при запуске приложений и некоторых игр в системе Windows XP. Причины могут быть разными: от полного отсутствия файла на устройстве до его повреждения из-за проблем с жестким диском. В данной статье мы предоставим подробные инструкции по устранению этой ошибки.
Варианты устранения проблемы 
Файл normaliz.dll, входящий в состав операционной системы, может быть загружен вручную с специализированных интернет-ресурсов или с использованием приложения, способного автоматически устанавливать отсутствующие библиотеки. Давайте детально разберем оба способа.
Установка библиотеки вручную 
В глобальной сети доступно множество платформ, позволяющих бесплатно загрузить необходимые библиотеки. После скачивания файла normaliz.dll с одного из таких ресурсов, его необходимо переместить в соответствующую системную директорию. Местоположение копии библиотеки зависит от архитектуры операционной системы. Для пользователей с 32-битной версией Windows, путь к папке будет следующим:
C:WindowsSystem32
В случае применения операционной системы с 64-битной архитектурой:
C:WindowsSysWOW64
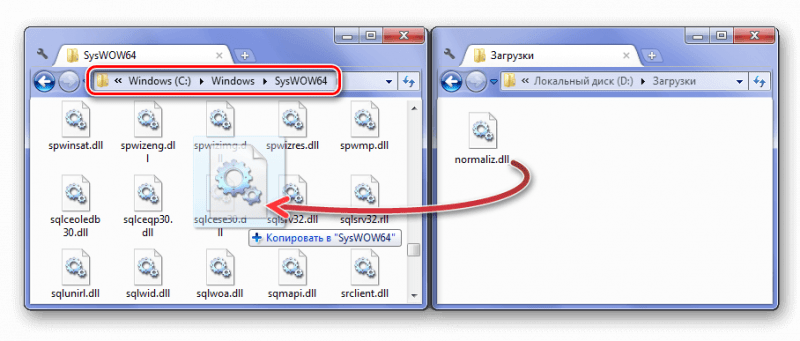
Копирование библиотеки в системный директорий
Библиотека перемещается в системную папку стандартным методом, включая перетаскивание файла или использование команды «скопировать-вставить». После успешной установки normaliz.dll в систему, программу можно запустить для проверки, была ли устранена ошибка. Для повышения надежности перед запуском программы рекомендуется выполнить перезагрузку операционной системы Windows.
Используем приложение DLL-Files.com Client 
Данное приложение обладает собственным хранилищем веб-ресурсов, где оно отыскивает необходимые библиотеки и осуществляет их автоматическую установку. Использование программы довольно удобно, но оплата за ее услуги неизбежна. Для того чтобы с ее помощью обнаружить и установить файл normaliz.dll, необходимо выполнить следующие действия:
- После загрузки и установки программы запускаем её.
- Далее в поисковую строку вводим normaliz.dll и кликаем по кнопке «Выполните поиск…» .
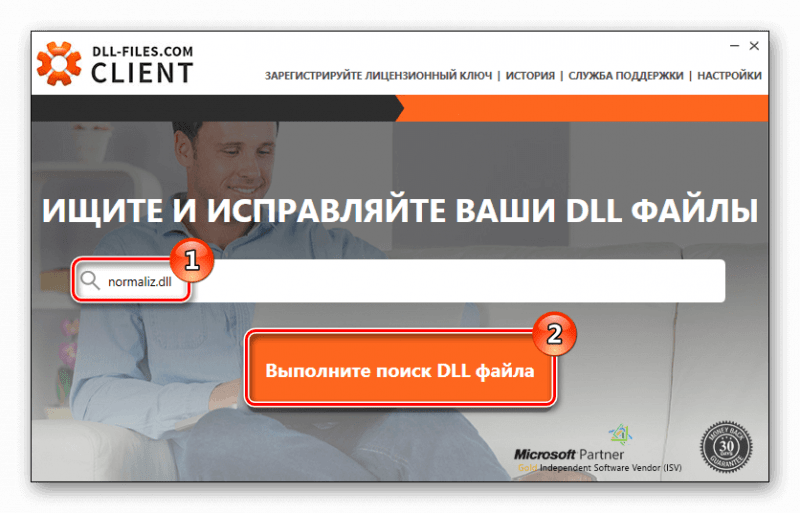
Начинаем процесс поиска файла под названием normaliz.dll.
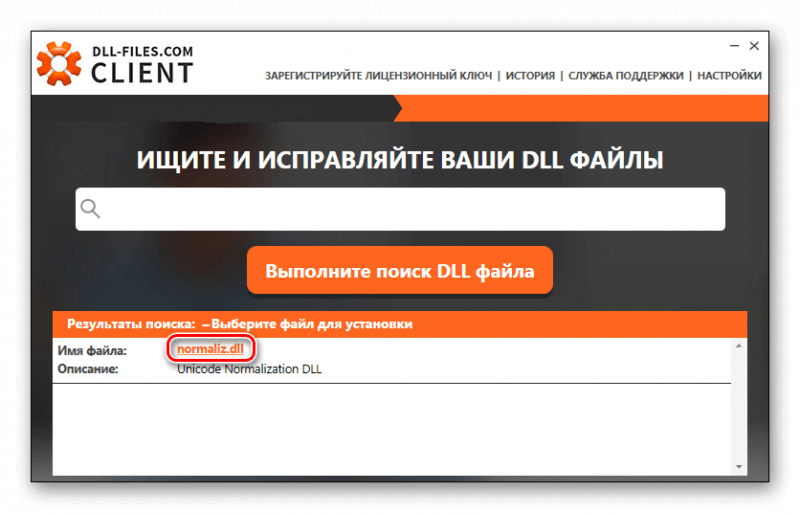
Выполняем отбор подходящей библиотеки из полученных результатов поиска.
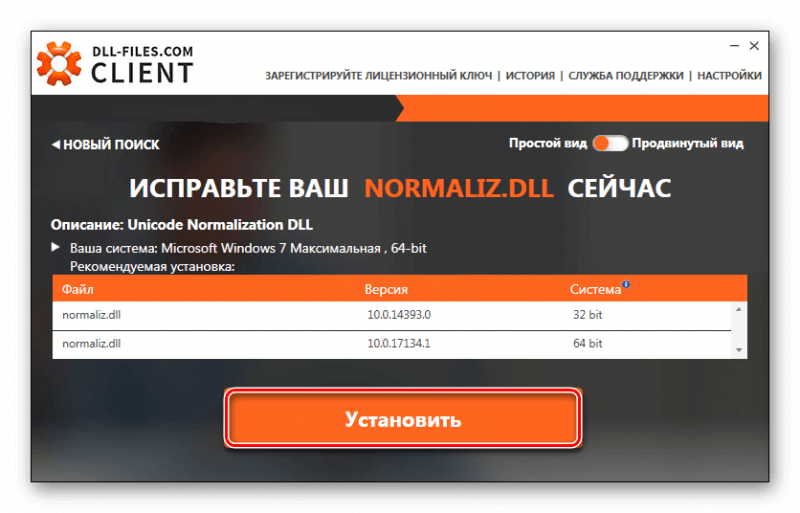
Внедряем файл normaliz.dll в операционную систему.
Итак, файл успешно интегрирован в систему. После следующей перезагрузки компьютера, как ожидается, проблема с ошибками исчезнет.
Вот и завершается наша статья. Желаем успехов в преодолении возникших сложностей.