Несмотря на то, что Internet Explorer утратил былую популярность и уже не считается одним из лучших браузеров, он все еще обладает рядом привлекательных особенностей. В частности, уникальная технология ActiveX, которая присутствует только в этом браузере. В сегодняшней статье мы подробно рассмотрим эту функцию и обсудим, необходима ли технология ActiveX в современном мире.
Что такое ActiveX?
ActiveX представляет собой платформу или дополнение, которая служит основой для разработки элементов программирования веб-сайтов, предназначенных для Internet Explorer. Эти элементы представляют собой стандартные приложения, однако их особенность заключается в том, что запуск осуществляется не по инициативе пользователя, а системой, и применение ограничено только браузером.
Управляющие компоненты ActiveX представляют собой инструменты, которые значительно расширяют возможности веб-сайтов. Эти элементы широко применяются в корпоративной среде. Чаще всего они встречаются на интернет-страницах, связанных с финансовыми транзакциями, где с их помощью устанавливаются программные средства безопасности. В результате пользователи в интерфейсе браузера сталкиваются с диалогами для ввода пин-кодов и выполнения операций по отправке финансовой документации.
Как установить ActiveX?
По умолчанию плагин должен быть интегрирован в браузер Internet Explorer; если это не так, информация об установке будет доступна на соответствующем веб-ресурсе. Важно отметить, что для отображения панели, изображенной на предыдущем рисунке, веб-страница потребует наличия компонентов ActiveX.
Для установки данного плагина необходимо выбрать соответствующий пункт из появившегося на веб-странице выпадающего меню.
Как включить компонент?
Для настройки и активации ActiveX в браузере Internet Explorer необходимо следовать данным указаниям:
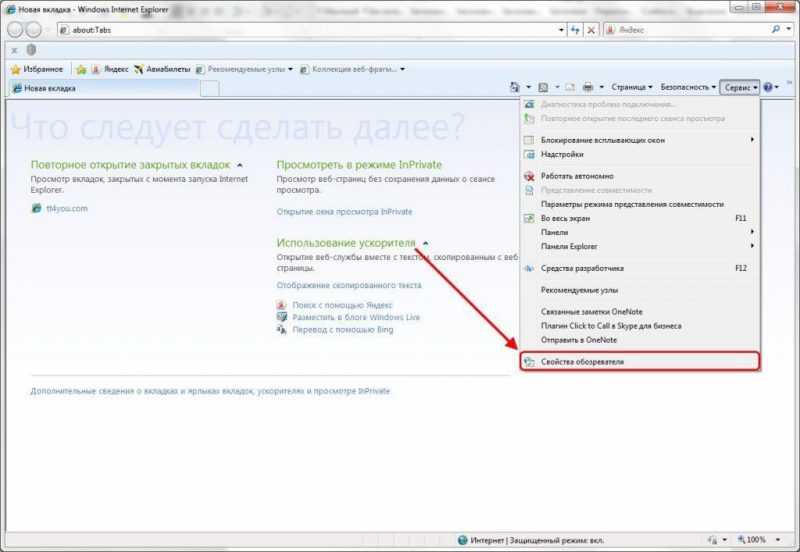
- В браузере Internet Explorer следует нажать на пункт меню «Сервис» и выбрать опцию «Свойства обозревателя».
Активируем параметры проводника.
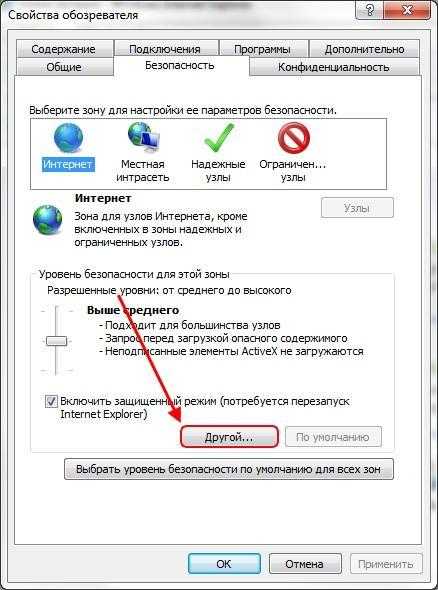
Мы переключаемся на специальные настройки защиты.
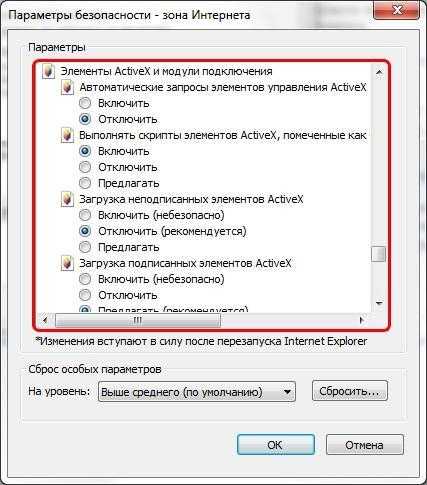
Активируем требуемые настройки модуля.
Таким образом реализуется интеграция ActiveX, но если выбрать все опции, это может повлиять на стабильность работы браузера. Предлагаю вам внимательно изучить представленные ниже параметры настройки.
Как настроить ActiveX?
Для корректной настройки параметров следует выделить упомянутые элементы посредством описанного метода.
- «Автоматические запросы элементов управления ActiveX» — отключите для снижения риска вирусной атаки.
- «Включить фильтрацию ActiveX» — активируйте для выборочного запуска в целях безопасности.
- «Разрешать использовать ActiveX без запроса только утвержденным доменам» — включите для активации только на доверенных сайтах.
- «Разрешить запуск элементов управления ActiveX, которые не использовались» — выключите, чтобы не запускать блоки, которые раньше не использовались.
- «Скачивание неподписанных элементов» — отключите, чтобы не активировать сомнительные и потенциально опасные объекты.
- «Скачивание подписанных элементов» — разрешите предлагать, чтобы отображать запрос на загрузку.
Это лишь базовые настройки, которые необходимо отрегулировать. Как вы, возможно, заметили, плагин также предлагает более детализированные параметры. Хотя вы можете провести с ними эксперименты, я советую сохранить их в исходном состоянии, как это определено по умолчанию.
В заключение стоит решить вопрос, поставленный в начале статьи: «Необходим ли ActiveX?». С одной стороны, поддержка технологии ActiveX ограничена только браузером Internet Explorer, в то время как подавляющее большинство опытных интернет-пользователей предпочитают другие браузеры и мало знакомы с этой технологией. Если же вам абсолютно необходимо посещать сайты, требующие ActiveX, то его использование становится неизбежным. Однако важно проверить, что все предписанные настройки установлены корректно, так как злоумышленники нередко используют ActiveX для распространения шпионского ПО.
Просмотры поста: 1 708Илья Смолин — это имя человека, которого можно встретить в разных контекстах.Недавние публикации писателя:
- Замена USB разъема на материнской плате
- Класс не зарегистрирован в Windows 10
- Как припаять провода к батарейке BIOS
Выразился ли материал понравившимся вам?Количество отзывов: 2Гриша Гурьев – это имя, которое можно перефразировать, сохраняя его уникальность, например:Григорий Гурьянов10 января 2020 года в 12:29Неожиданно у меня возникла проблема с блокировкой установки ActiveX в файловом менеджере Explorer. Пожалуйста, окажите помощь.Олег Гусев — это имя человека, которое не связано с автором запроса или каким-либо искусственным интеллектом.12 января 2020 года, в 15 часов 32 минуты
Не вполне ясно, о чем говорится, учитывая, что ActiveX является системным компонентом от Microsoft и не должен блокироваться. Давайте разберемся. Если ActiveX блокирует какой-либо элемент на веб-странице (причин может быть множество, и нет необходимости вдаваться в подробности), в адресной строке браузера отобразится значок в виде синего круга. Необходимо кликнуть на него и отключить ActiveX, что позволит всем элементам отобразиться на странице. Это похоже на собственный AdBlock в Windows, который иногда только мешает.Кроме того, браузер и операционная система могут блокировать работу ActiveX, если компонент устарел. Это обычная практика для обеспечения безопасности, поэтому старые плагины для браузеров в конечном итоге блокируются. Однако речь идет только о старых версиях. В таких случаях под адресной строкой появляется сообщение о блокировке одного из плагинов, а рядом с ним кнопка «Обновить» (Update). Следует нажать на эту кнопку, и браузер перенаправит вас на страницу, где можно скачать обновленную версию ActiveX или другого устаревшего компонента.Также важно установить обновления для операционной системы. Рекомендуется перейти на Windows 10 и использовать браузер Edge, так как поддержка Windows 7 уже прекращена, и в скором времени будут заблокированы многие другие плагины. Internet Explorer также не вечен и вскоре будет выведен из эксплуатации. Подробная инструкция по переходу на Windows 10 доступна по ссылке. Удачи в обновлении всего программного обеспечения и поддержании его в актуальном состоянии.
Мы с радостью поддержали Вас в преодолении сложностей и достижении успешного результата.
Поблагодарите создателя материала и распространите информацию в социальных сетях.
Воспроизведение и распространение контента данного веб-ресурса допускается только при условии указания активной ссылки на первоисточник.