В программном обеспечении 1С: Предприятие предусмотрены специализированные средства самодиагностики и коррекции проблем, способствующие восстановлению функциональности приложения для пользователей.
Устранение ошибки при запуске программы
При возникновении проблемы с запуском программы из-за ошибки 0x00000005, рекомендуется применять инструмент автоматической проверки целостности базы данных для устранения сбоя.
- Открываем директорию 1С: Предприятие в Program Files.
- Заходим в папку, в названии которой указан номер версии
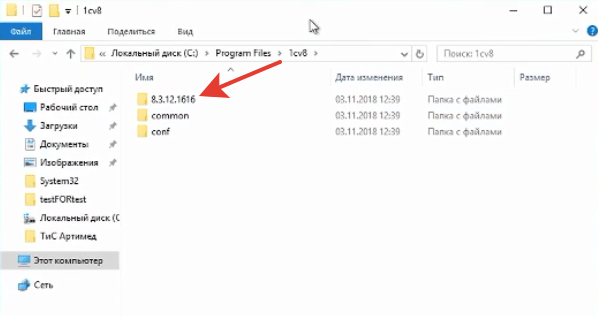
В данном каталоге содержатся файлы, относящиеся к программному обеспечению.
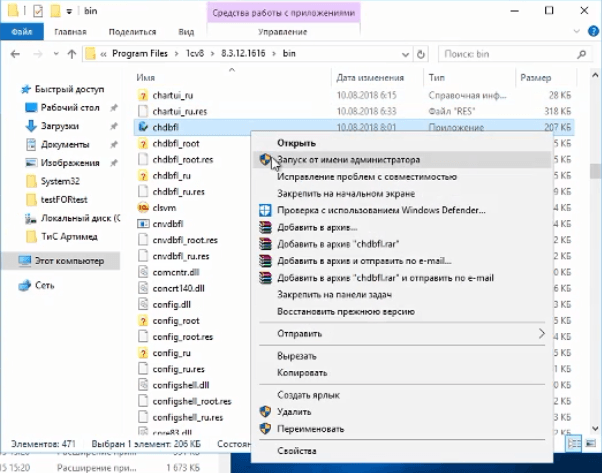
Файл для автоматизированного тестирования и устранения ошибок в системе 1С.
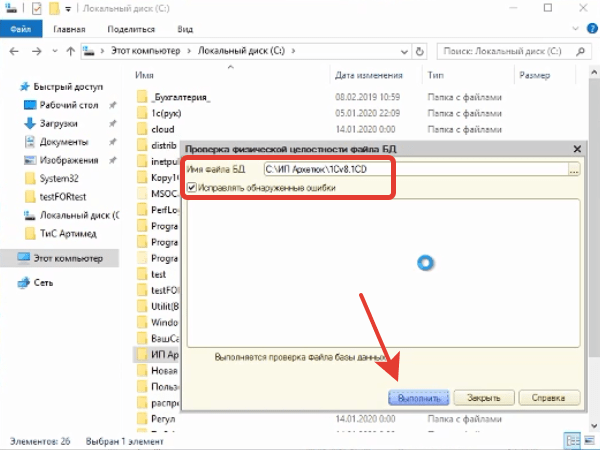
Проверяется состояние файла базы данных на предмет целостности.
Инструмент проведет проверку целостности базы данных и устранит обнаруженные проблемы.
Использование инструментов отладки 1С
Встречающаяся трудность связана с ошибками в настройках, препятствующими выполнению конкретных задач. В данном случае мы сталкиваемся с невозможностью корректировки бухгалтерской политики компании. Сообщение об ошибке указывает на проблему в глобальном компоненте. Для выявления причины неисправности будет полезна возможность отладки. Прежде всего, следует убедиться в возможности изменения конфигурации.
- Запускаем конфигуратор 1С.
- Раскрываем меню «Конфигурация» и нажимаем «Открыть конфигурацию».
- Снова раскрываем меню «Конфигурация», выбираем раздел «Поддержка» и переходим к настройке поддержки.
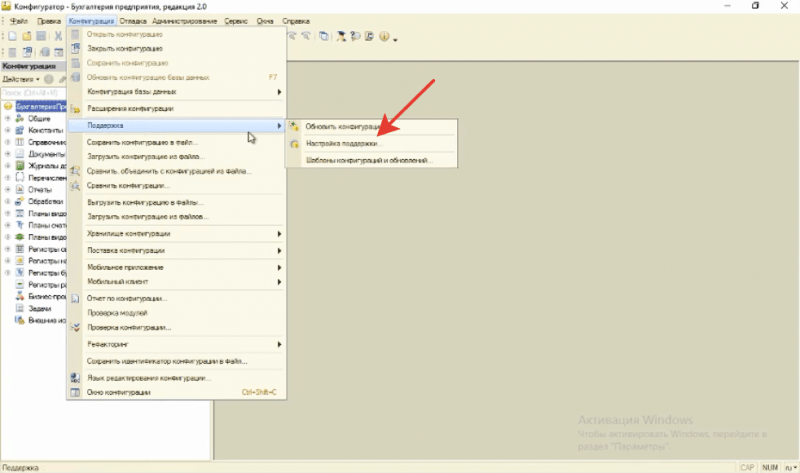
Проверяем параметры обеспечения функционирования конфигурации.
- Переходим по пути «Общие» — «Общие модули». Находим «Глобальный модуль» и проверяем, чтобы он был в режиме «Редактируется с сохранением поддержки». У вас может быть другой модуль, нужен тот, название которого указано в сообщении об ошибке.
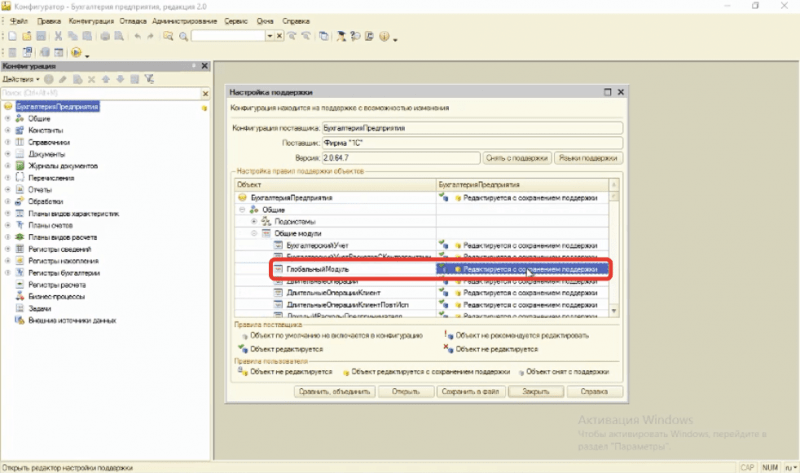
- Если модуль не редактируется, то кликаем по режиму правой кнопкой и выбираем пункт «Установить правило поддержки». Выбираем опцию «Объект поставщика редактируется с сохранением поддержки».
Получив согласие на внесение изменений, мы инициируем запуск отладчика. В разделе «Конфигурация» следуем маршруту «Общие» — «Общие модули» и открываем «Глобальный Модуль» двойным нажатием.
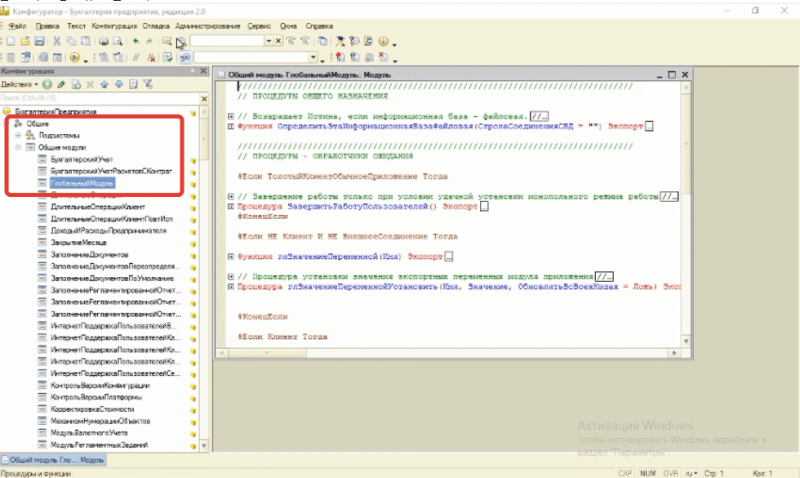
Выявляем и выбираем компонент с повреждениями.
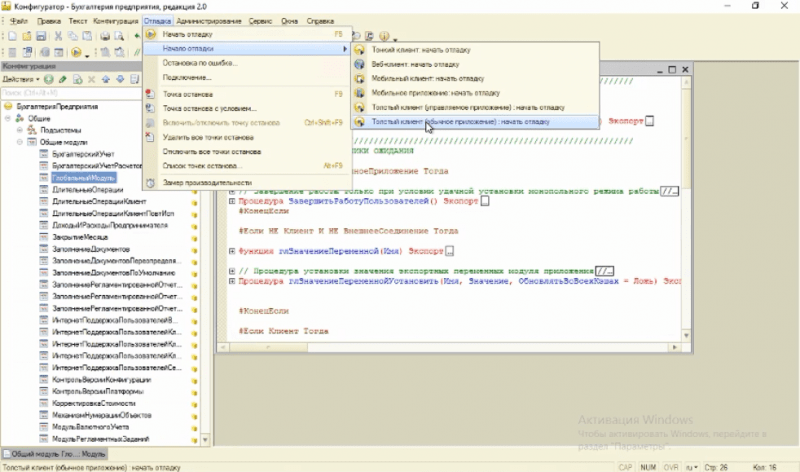
- Раскрываем меню «Отладка».
- Выделяем раздел «Начало отладки» и выбираем в нём пункт «Толстый клиент (обычное приложение)».
Выбор метода дебагинга
- Внизу появится окно стека вызовов. В нём могут сразу отобразиться ошибки. Если в стеке вызовов нет ошибок, снова раскрываем меню «Отладка». Выбираем пункт «Остановка по ошибке». Отмечаем пункт «Останавливаться по ошибке» и нажимаем «ОК» для применения конфигурации.
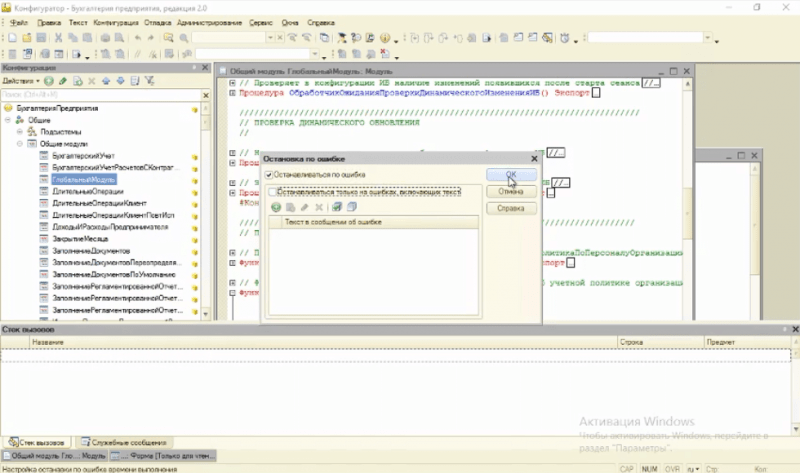
Настройка отладчика программы 1С.
- Раскрываем меню «Отладка» и нажимаем «Перезапустить».
- Раскрываем меню «Предприятие», выделяем раздел «Учётная политика» и выбираем пункт «Учётная политика организаций».
- Закрываем окно сообщения об ошибке.
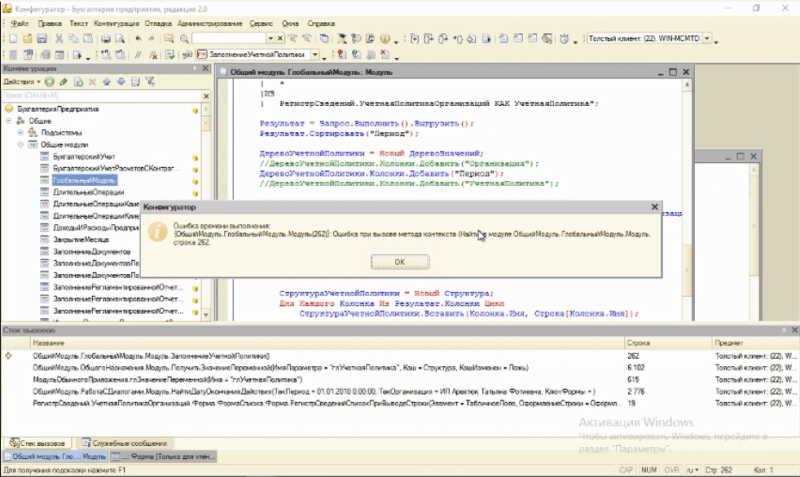
В данном сообщении содержится более детальная информация о возникшей ошибке.
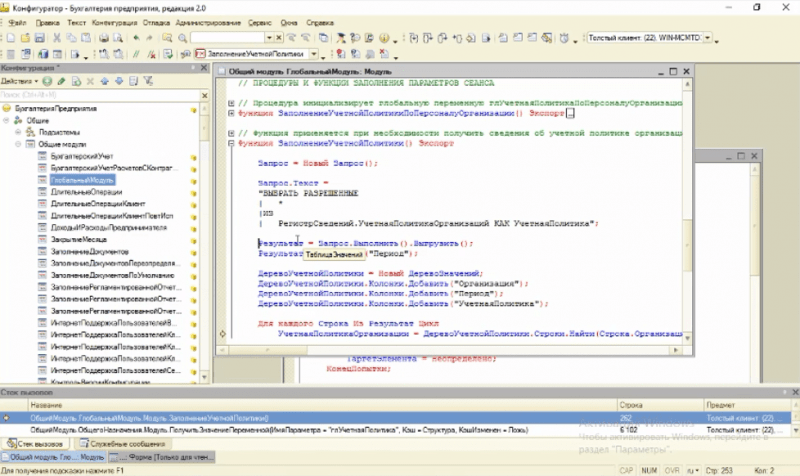
- В стеке вызовов двойным кликом открываем первую строку.
- Смотрим, куда указывает стрелка — это место остановки модули из-за ошибки. Читаем, в чём проблема.
Отладчик указывает на данное место в коде.
В данном случае отладчик указывает на то, что модуль не может обнаружить строку «Организация». Мы начинаем детальное изучение модуля с его истоков, стремясь выявить место, где должна быть представлена указанная информация.
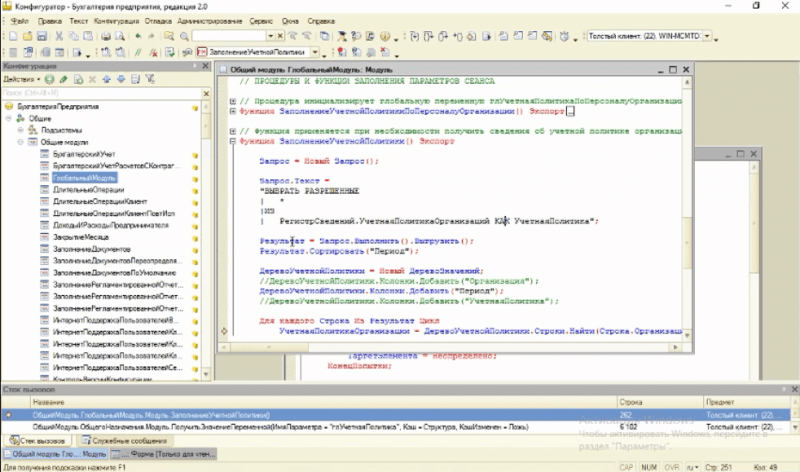
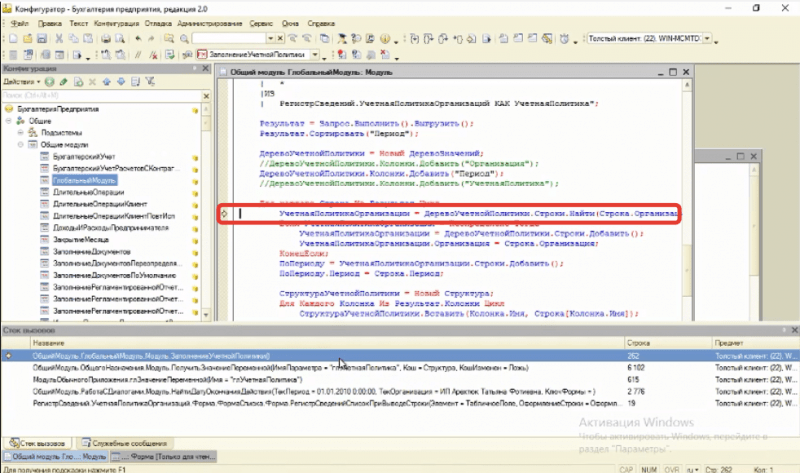
Именно здесь заключается корень нашей сложности — необходимая команда не выполняется.
Проблема быстро выявляется. Кто-то оставил комментарий на строке с колонкой «Организация». Удаляем комментарий из обоих элементов (//) и повторно запускаем процесс отладки.
Исправление неточности в компоненте программного обеспечения.
Ошибки больше не препятствуют корректировке или расширению учетной стратегии организации. Таким же образом возможно выявлять и устранять причины иных сложностей.